Pärast toiteallika katkestamist peab mootor veel mõnda aega pöörlema, enne kui see oma inertsi tõttu seiskub.Tegelikes töötingimustes nõuavad mõned koormused mootori kiiret seiskamist, mis nõuab mootori pidurdamise juhtimist.Niinimetatud pidurdamine on mootorile pöörlemissuunale vastupidise pöördemomendi andmine, et see kiiresti seiskuks.Üldiselt on kahte tüüpi pidurdusmeetodeid: mehaaniline pidurdus ja elektriline pidurdamine.
Mehaaniline pidurdamine kasutab pidurdamise lõpuleviimiseks mehaanilist struktuuri.Enamik neist kasutab elektromagnetilisi pidureid, mis kasutavad vedrude tekitatud survet piduriklotside (piduriklotside) vajutamiseks, et moodustada piduriratastega pidurdushõõrdumine.Mehaaniline pidurdamine on kõrge töökindlusega, kuid see tekitab pidurdamisel vibratsiooni ja pidurdusmoment on väike.Seda kasutatakse tavaliselt väikese inertsi ja pöördemomendiga olukordades.
Elektriline pidurdus tekitab mootori seiskamise ajal roolile vastupidise elektromagnetilise pöördemomendi, mis toimib pidurdusjõuna mootori seiskamiseks.Elektrilised pidurdusmeetodid hõlmavad tagurpidi pidurdamist, dünaamilist pidurdamist ja regeneratiivpidurdust.Nende hulgas kasutatakse tagurpidiühenduse pidurdamist üldiselt madalpinge ja väikese võimsusega mootorite hädapidurdamiseks;regeneratiivpidurdusel on sagedusmuunduritele erinõuded.Üldjuhul kasutatakse hädapidurduseks väikese ja keskmise võimsusega mootoreid.Pidurdustõhusus on hea, kuid hind on väga kõrge ja elektrivõrk peab suutma seda vastu võtta.Energia tagasiside muudab võimsate mootorite pidurdamise võimatuks.
Pidurdustakisti asendi järgi saab energiat tarbiva pidurdamise jagada alalisvoolu energiat tarbivaks pidurdamiseks ja vahelduvvoolu energiat tarbivaks pidurdamiseks.Alalisvoolu energiat tarbiv piduritakisti tuleb ühendada inverteri alalisvoolu poolega ja seda saab kasutada ainult ühise alalisvoolu siiniga muundurite puhul.Sel juhul on vahelduvvoolu energiat tarbiv piduritakisti otse ühendatud vahelduvvoolu poolelt mootoriga, millel on laiem kasutusala.
Mootori poolel on konfigureeritud pidurdustakisti, et tarbida mootori energiat, et saavutada mootori kiire seiskamine.Pidurdustakisti ja mootori vahele on konfigureeritud kõrgepinge vaakumkaitselüliti.Tavaolukorras on vaakumkaitselüliti avatud olekus ja mootor on normaalne.Kiiruse reguleerimine või võimsuse sageduse töö, hädaolukorras avaneb mootori ja sagedusmuunduri või elektrivõrgu vaheline vaakumkaitselüliti ning mootori ja piduritakisti vaheline vaakumkaitselüliti on suletud ning energiatarve mootori pidurdamine toimub pidurdustakisti kaudu., saavutades seeläbi kiire parkimise efekti.Süsteemi üherealine diagramm on järgmine:
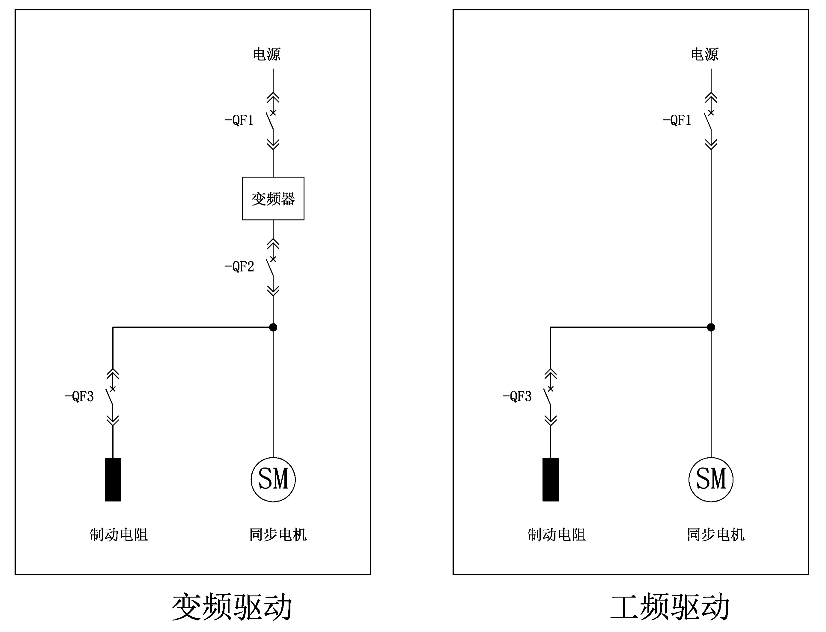
Hädapiduri ühe joone skeem
Hädapidurdusrežiimis ja vastavalt aeglustusaja nõuetele reguleeritakse ergutusvoolu sünkroonmootori staatori voolu ja pidurdusmomendi reguleerimiseks, saavutades seeläbi mootori kiire ja juhitava aeglustuse juhtimise.
Kuna tehase elektrivõrk ei võimalda toite tagasisidet, siis katsealuse projektis, et tagada elektrisüsteemi ohutu seiskumine kindlaksmääratud aja jooksul (alla 300 sekundi) hädaolukorras, takisti energial põhinev hädaseiskamissüsteem. tarbimispidurdus oli seadistatud.
Elektriajamisüsteem sisaldab kõrgepinge inverterit, suure võimsusega topeltmähisega kõrgepingemootorit, ergutusseadet, 2 komplekti piduritakisteid ja 4 kõrgepingekaitselülitit.Kõrgepinge muundurit kasutatakse kõrgepingemootori muutuva sagedusega käivitamise ja kiiruse reguleerimiseks.Mootorile ergutusvoolu andmiseks kasutatakse juht- ja ergutusseadmeid ning mootori sagedusmuunduri kiiruse reguleerimise ja pidurdamise ümberlülitamiseks kasutatakse nelja kõrgepinge kaitselülitit.
Hädapidurdamisel avatakse kõrgepingekapid AH15 ja AH25, kõrgepingekapid AH13 ja AH23 suletakse ning pidurdustakisti hakkab tööle.Pidurisüsteemi skemaatiline diagramm on järgmine:
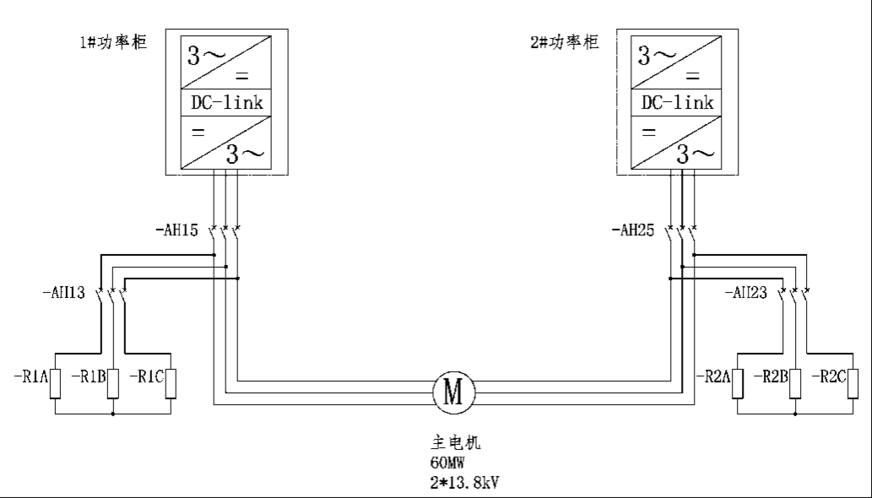
Pidurisüsteemi skemaatiline diagramm
Iga faasitakisti (R1A, R1B, R1C, R2A, R2B, R2C,) tehnilised parameetrid on järgmised:
- Pidurdusenergia (maksimaalne): 25MJ;
- Külmakindlus: 290Ω±5%;
- Nimipinge: 6,374kV;
- Nimivõimsus: 140kW;
- Ülekoormusvõime: 150%, 60S;
- Maksimaalne pinge: 8kV;
- Jahutusmeetod: loomulik jahutamine;
- Tööaeg: 300S.
See tehnoloogia kasutab suure võimsusega mootorite pidurdamiseks elektrilist pidurdamist.See rakendab mootorite pidurdamiseks sünkroonmootorite armatuuri reaktsiooni ja energiatarbimise pidurdamise põhimõtet.
Kogu pidurdusprotsessi vältel saab pidurdusmomenti juhtida ergutusvoolu juhtimisega.Elektrilisel pidurdamisel on järgmised omadused:
- See suudab tagada seadme kiireks pidurdamiseks vajaliku suure pidurdusmomendi ja saavutada suure jõudlusega pidurdusefekti;
- Seisakuaeg on lühike ja pidurdamist saab teostada kogu protsessi vältel;
- Pidurdusprotsessi ajal puuduvad sellised mehhanismid nagu piduripidurid ja pidurirõngad, mis panevad mehaanilise pidurisüsteemi üksteise vastu hõõruma, mille tulemuseks on suurem töökindlus;
- Hädapidurdussüsteem võib töötada üksi iseseisva süsteemina või integreerida teistesse juhtimissüsteemidesse alamsüsteemina koos paindliku süsteemiintegratsiooniga.
Postitusaeg: 14. märts 2024