Elektrisõidukite elektrijuhtimise olemus on mootori juhtimine.Selles artiklis kasutatakse elektrisõidukite juhtimise optimeerimiseks tööstuses tavaliselt kasutatavat täht-delta käivituse põhimõtet, nii et 48 V elektriajamisüsteem võib saada 10–72 kW mootori ajami peamiseks vormiks.Tagatud on kogu sõiduki jõudlus ning samal ajal väheneb oluliselt väikeautode ja miniautode elektriajami maksumus,

Hiljutises uuringus mõistsin, et elektrisõidukite juhtimine on tegelikult mootori juhtimine.Kuna käesolevas artiklis sisalduvad teadmised on väga ulatuslikud ja üksikasjalikud, siis kui mootori juhtimisskeemi optimeerimise põhimõte ja protsess on täielikult üksikasjalikult kirjeldatud, piisab autori praegu loetavate õpikute järgi teadmispunktidest monograafia koostamiseks. rohkem kui 100 lehekülje ja üle 100 000 sõnaga.Et võimaldada omameedia lugejatel sellist optimeerimismeetodit tuhandete sõnade ulatuses mõista ja valdada.Selles artiklis kasutatakse konkreetseid näiteid, et kirjeldada elektrisõidukite mootoriskeemi optimeerimise protsessi.
Siin kirjeldatud näited põhinevad Baojun E100, BAIC EC3 ja BYD E2.Ainult järgmised kahe mudeli parameetrid peavad olema seotud ja ainult mootori juhtimine on optimeeritud, et optimeerida see 48V/144V alalisvoolu kahepingeliseks akusüsteemiks, vahelduvvoolu 33V/99V kahepingeliseks mootoriks ja mootoridraiverite komplektiks. .Nende hulgas on mootorijuhi jõuelektrooniline süsteem kogu optimeerimisskeemi võti ning autor uurib seda hoolikalt ja põhjalikult.
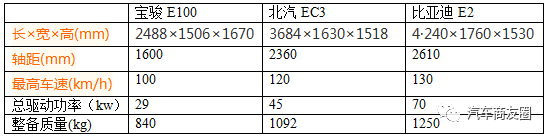
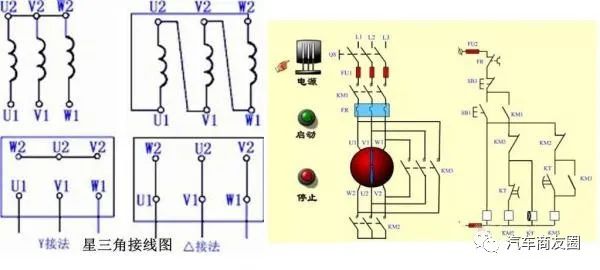
Teisisõnu, Baojun E100, BAIC EC3 ja BYD E2 mootorid tuleb optimeerida ainult 29–70 kW mootori juhtimissüsteemile.Need on A00 miniauto, A0 väikeauto ja A kompaktse puhta elektriauto esindajad.Selles artiklis kasutatakse tööstusliku kolmefaasilise asünkroonse mootori juhtimismeetodit, et rakendada seda elektrisõidukite mootorite juhtimisel täht-kolmnurga, V/F+DTC kolmefaasilise asünkroonse asünkroonse mootori juhtimisega.
Ruumipiirangu tõttu ei selgita see artikkel tähekolmnurga põhimõtteid ja nii edasi.Alustame tööstusmootori juhtimises levinud mootorivõimsusest.Tavaliselt kasutatav 380 V kolmefaasiline asünkroonmootor on 0,18–315 kW, väikese võimsusega Y-ühendus, keskmise võimsusega △-ühendusega ja suure võimsusega 380/660 V mootor.Üldiselt on 660 V mootorid peamised mootorid, mille võimsus on üle 300 kW.Asi pole selles, et üle 300KW mootorid ei saaks kasutada 380V, vaid nende ökonoomsus pole hea.See on vool, mis piirab mootori ja juhtimisahela ökonoomsust.Tavaliselt võib 1 ruutmillimeeter läbida 6A voolu.Kui kolmefaasiline asünkroonne asünkroonmootor on projekteeritud, määratakse selle mootori mähiskaabel.See tähendab, et läbiv vool määratakse kindlaks.Tööstuslike mootorite vaatenurgast on 500A oma majanduse jaoks suurim väärtus.
Tagasi elektrisõiduki mootori juurde, siis 48V akusüsteemi PWM kolmefaasiline pinge on 33V.Kui tööstusliku mootori ökonoomne vool on 500A, on 48V elektrisõiduki maksimaalne ökonoomne väärtus kolmefaasilise asünkroonmootori puhul umbes 27KW.Samas, arvestades sõiduki dünaamilisi omadusi, on maksimaalse voolu saavutamise aeg väga lühike, tavaliselt mitte rohkem kui paar minutit, ehk 27KW saab teha ülekoormusseisundiks.Tavaliselt on ülekoormusseisund 2–3 korda suurem kui normaalseisund.See tähendab, et normaalne töötingimus on 9 ~ 13,5 kW.
Kui vaatame ainult pingetaseme ja vooluvõimsuse vastavust.48 V süsteem võib olla ainult 30 kW piires, kuna sõidutõhusus on parim töötingimus.
Kolmefaasiliste asünkroonmootorite jaoks on aga palju juhtimismeetodeid.Elektrisõidukitel on lai kiiruse reguleerimise vahemik (peaaegu 0-100%) ja pöördemomendi reguleerimisvahemik (peaaegu 0-100%).Karmides töötingimustes kasutavad elektrisõidukid praegu peamiselt VF või DTC juhtimist.Star-delta juhtimine võib põhjustada ootamatu efekti.
Tööstuslikus juhtimises on täht-kolmnurk juhtpinge 1,732 korda, mis on pigem juhus kui põhimõte.48 V süsteem ei suurenda PWM sagedusmodulatsiooni, et muuta vahelduvvool 33 V, ja tööstusliku mootori pingetaseme järgi projekteeritud mootor on 57 V.Kuid me reguleerime täht-kolmnurga juhtpinge taseme 3 korda, mis on 9 juur.Siis oleks 99V.
See tähendab, et kui mootor on konstrueeritud 99 V vahelduvvoolu kolmefaasilise asünkroonmootorina, millel on kolmnurkne ühendus ja 33 V Y ühendus, saab mootori kiirust ökonoomsemalt reguleerida vahemikus 0 kuni 100% võimsusvahemikus 20 kuni 72 kW. tingimused.Tavaliselt on mootori maksimaalne kiirus 12000 RPM, pöördemomendi reguleerimine on 0-100% ja sagedusmodulatsioon on 0-400 Hz.
Kui sellist optimeerimisskeemi saab realiseerida, siis A-klassi autod ja miniautod saavad ühe mootoriga head jõudlust.Teame, et 48 V mootorisüsteemi maksumus (30 kW tippväärtuse piires) on umbes 5000 jüaani.Käesolevas artiklis esitatud optimeerimisskeemi maksumus pole teada, kuid see ei lisa materjale, vaid muudab ainult juhtimismeetodit ja võtab kasutusele kaks pingetaset.Selle kulude kasv on samuti kontrollitav.
Loomulikult tekib sellises kontrolliskeemis palju uusi probleeme.Suurimateks probleemideks on mootori konstruktsioon, juhi konstruktsioon ning kõrgepingeakupaki laadimis- ja tühjendusomaduste väga kõrged nõuded.Need probleemid on kontrollitavad ja lahendused on olemas.Näiteks mootori konstruktsiooni saab lahendada kõrge ja madalpinge pingetasemete suhte reguleerimisega.Arutame seda koos järgmises artiklis.
Postitusaeg: märts 02-2023